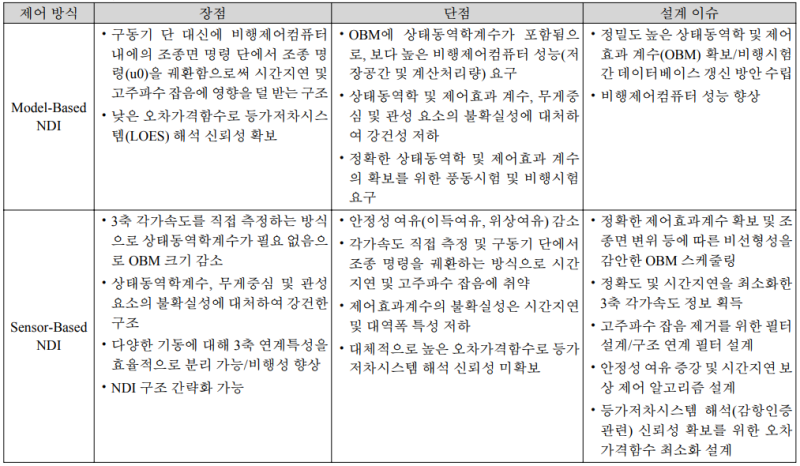
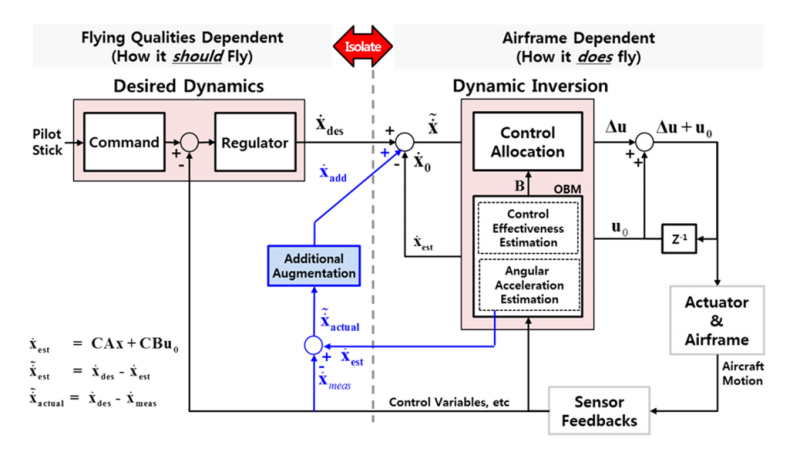
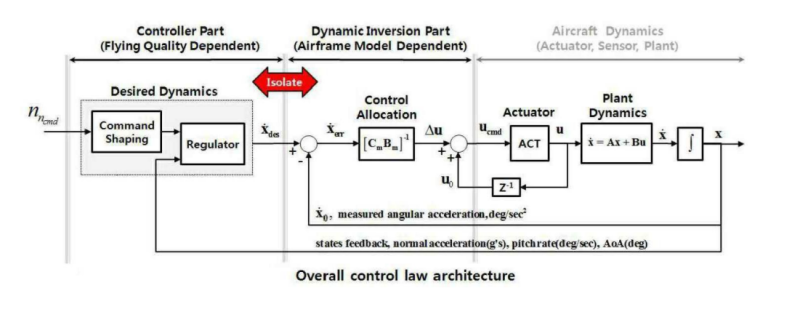
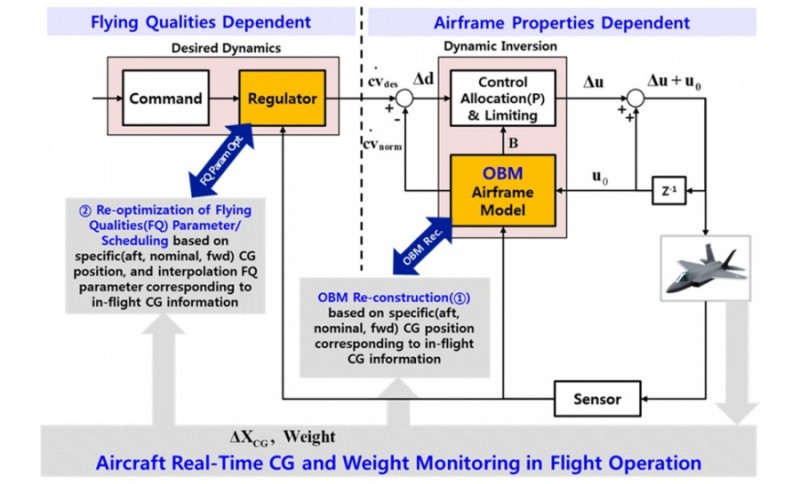
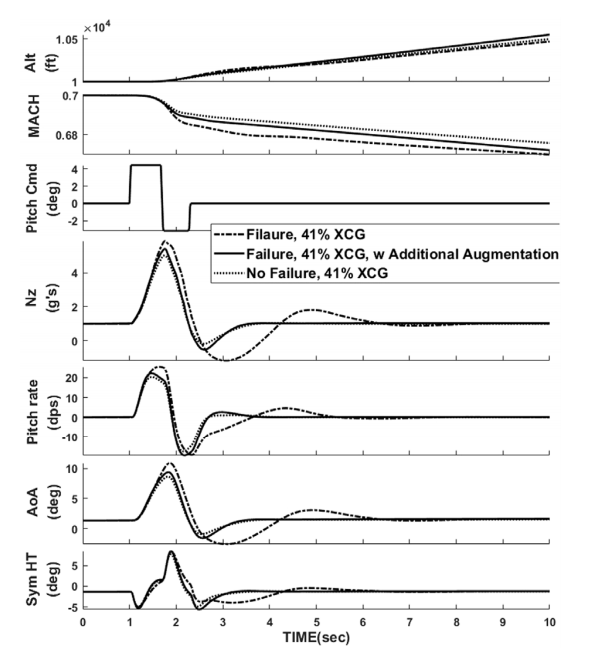
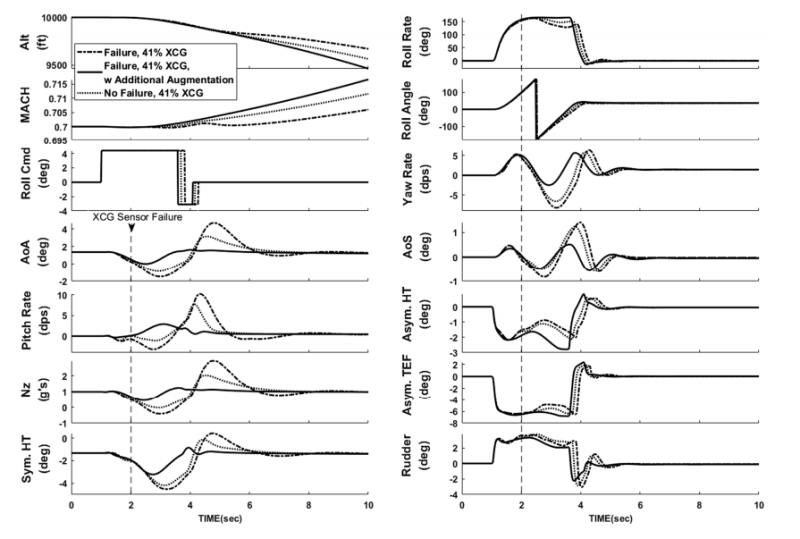
KF-X는 센서기반 NDI를 채택하고, 앞서 언급한 단점을 개선하기 위하여 항공기 동특성이 허용하는 범위 내에서 비행성과 안정성을 동시에 만족시키는 비행성 파라미터와 센서 결함 상태에서도 안정성을 유지할 수 있도록 하는 증강 알고리즘을 설계하는 연구를 수행하였습니다. 각가속도 센서를 이용한 제어 강건성을 더욱 향상시켰으며, 무게중심 측정 센서의 결함 발생 시에도 비행 안전성을 보장하기 위해 피치 각가속도 오차를 궤환 변수로 사용하는 증강 알고리즘 설계를 적용하였습니다. 그 결과 비행 안정성과 성능은 더욱 향상되었고, 결함 발생 상황에서도 정상 상태에 상응하는 비행성을 구현하였습니다. 특히, 롤 기동에 의한 세로축 연계 특성이 상당히 감소되어 비행성이 보다 향상되었습니다.
출처 : 고기동 전투기 비선형 동적 모델역변환 제어법칙 개발(제어로봇시스템학회논문지, 2017.09), 전투기급 항공기의 무게중심 예측 및 제어법칙 설계 평가(한국항공우주학회 2018 춘계학술대회), 비행 중 변화하는 종축 무게중심 대처 비행성 향상을 위한 비선형 동적 모델 역변환 제어 개발(제어로봇시스템학회논문지, 2018.03), 고기동 전투기에 적합한 모델/센서기반 비선형 동적 모델역변환 제어 기법 개발(제어로봇시스템학회논문지, 2018.07), 센서 기반 동적 모델역변환 제어 개발(항공우주시스템공학회 2018년도 춘계학술대회), 고기동 전투기 세로축 제어법칙 설계 및 비행성 파라미터 최적화에 관한 연구(제어로봇시스템학회논문지, 2018.08), 동적 모델 역변환 제어 개발 사례 및 방안(한국군사과학기술학회 2018 추계학술대회), 무게중심 측정 센서 고장 대처 강건한 제어 기법 개발(제어로봇시스템학회 논문지, 2019.03), 변화하는 무게중심에 대처하는 항공기의 비행성 및 안정성 향상을 위한 제어방법(10-2018-0103862), 항공기 세로축 안정성 및 비행성 충족을 위한 파라미터 최적화 방법(10-2018-0103861), 각가속도 정보를 이용한 비행체 제어방법(10-2018-0107589)