무유도 로켓의 이동표적 명중률을 높이기 위해 자세 센서와 거리측정기(LRF)를 이용해 표적의 기동 정보를 획득하고 사격제원을 산출하여 예상 목표지점을 화면에 도시하는 방법이 제시되었지만, 자세 센서의 정밀도가 요구조건에 충분하지 않은 경우 표적 정보의 추정 오차가 커지는 문제점이 있었다고 합니다.
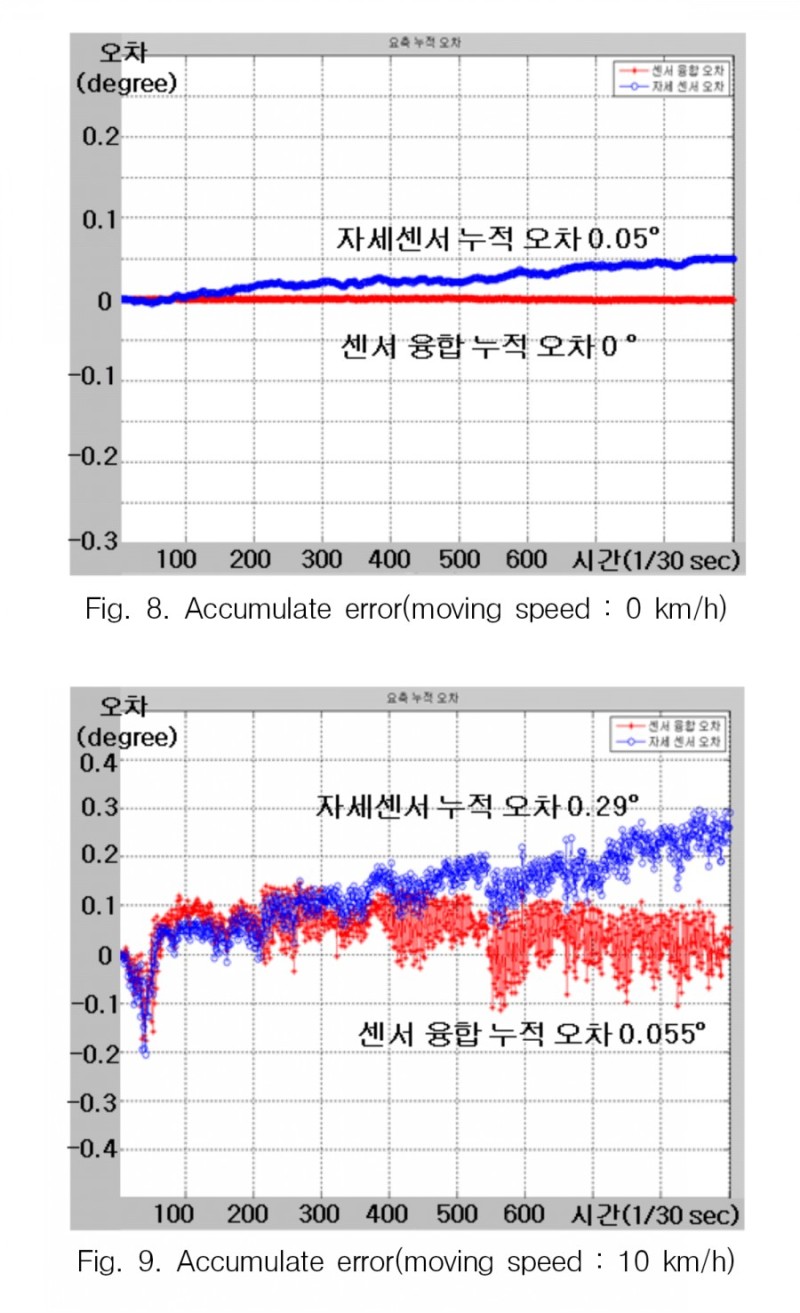
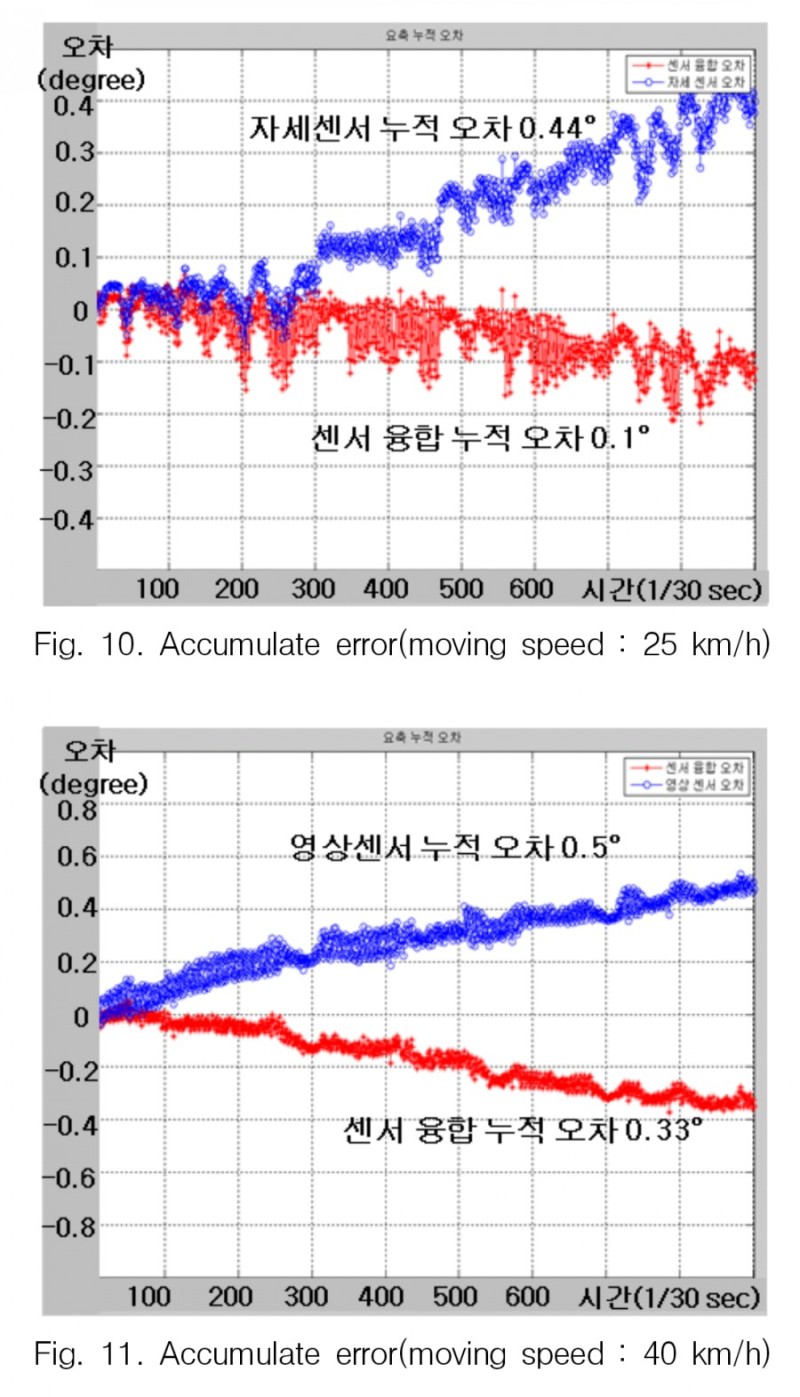
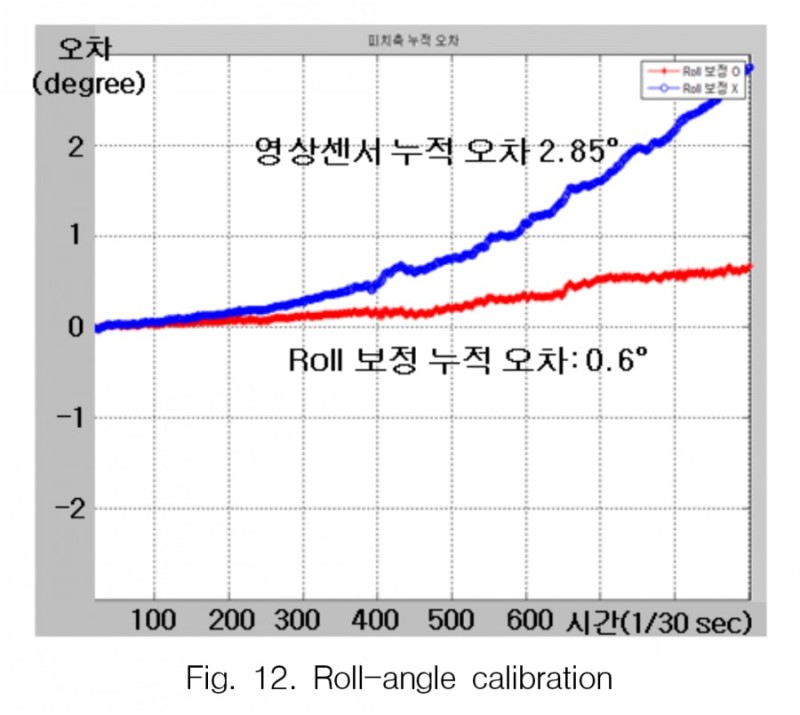
표적의 기동 정보를 정확하게 산출하기 위해, 영상 정보와 자세 센서 정보를 융합하여 조준장치의 회전 각속도를 획득하고
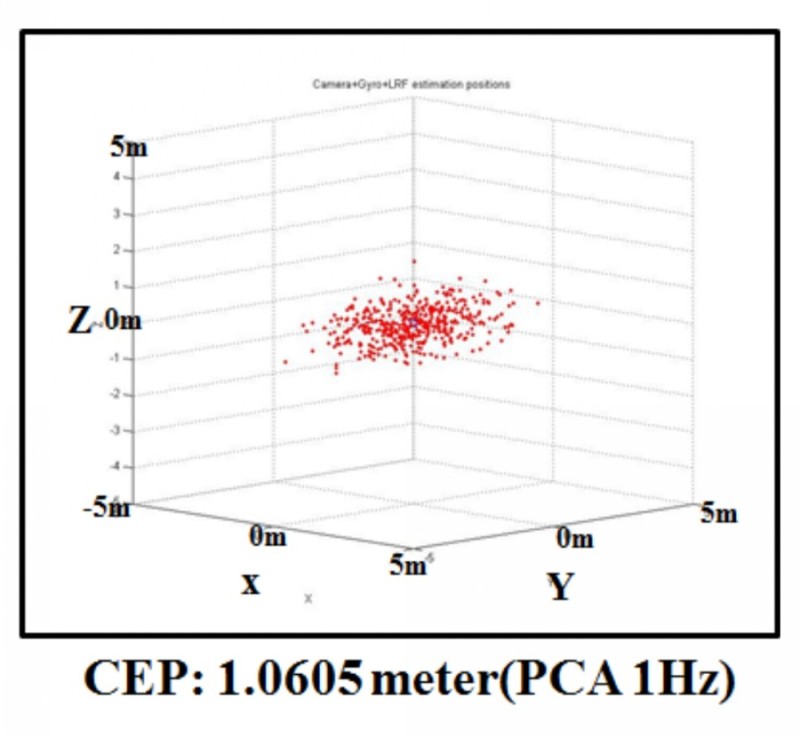
3차원 공간상에서의 표적의 위치와 속도 정보를 추정하는 기법을 고안했고,